| Human-Robot Collaboration | Exploration and Development in
Autonomous Systems |
Intelligent Tutoring Systems and
Education Software |
Perception and Control |
Robot
Design |
Robot Design
iCub
Before settling at its final version, the iCub head design went
through several discussions and designs. One of the ideas was to have a
spine like neck:
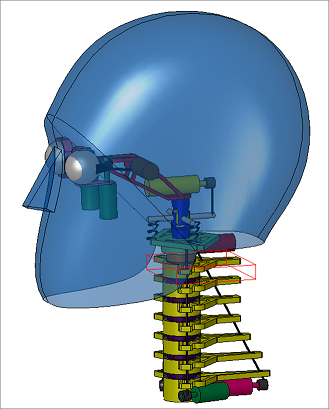
This idea was abandoned due to the control difficulties associated with
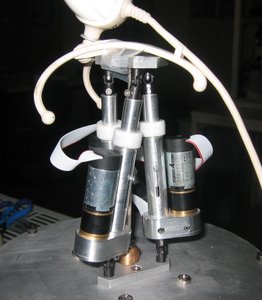
it. Another idea that can give more compact and powerful designs is
parallel manipulators. We did a prototype of it, here a (video) and an image
Finally the design went for a serial actuator consisting of several modules:
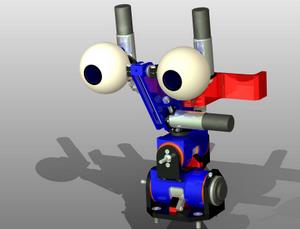
Videos of the first prototype: repetitive motions (stress test)
(video), inertial compensation (video) and light blob tracking (video).
Better controllers were developed latter based on an optimal controller with gains obtained from child data (video,video)
Biomimetic Eye-Neck Coordination, Manuel Lopes, Alexandre Bernardino, José Santos-Victor, Claes von Hofsten and Kerstin Rosander. IEEE - International Conference on Development and Learning (ICDL), Shanghai, China, 2009.
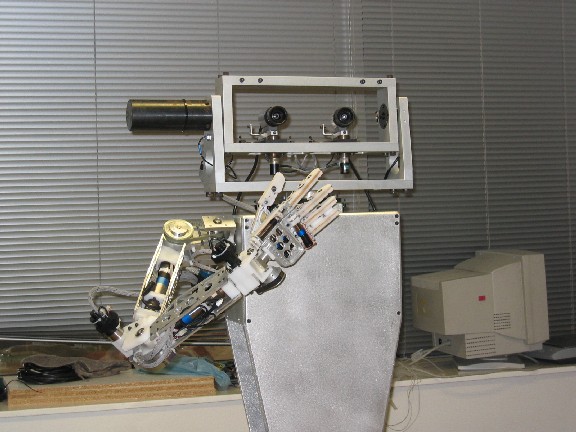
Baltazar
Kinematics Properties of BaltazarIn this experiment (video) we show one of the main properties of the anthropomorphic kinematics. The position of the 3 joint and the inverse kinematics used enables the robot to orient the hand solely by setting the initial condition of the algorithm. This kind of kinematics is good to avoid obstacles.
Head Tracking the Hand
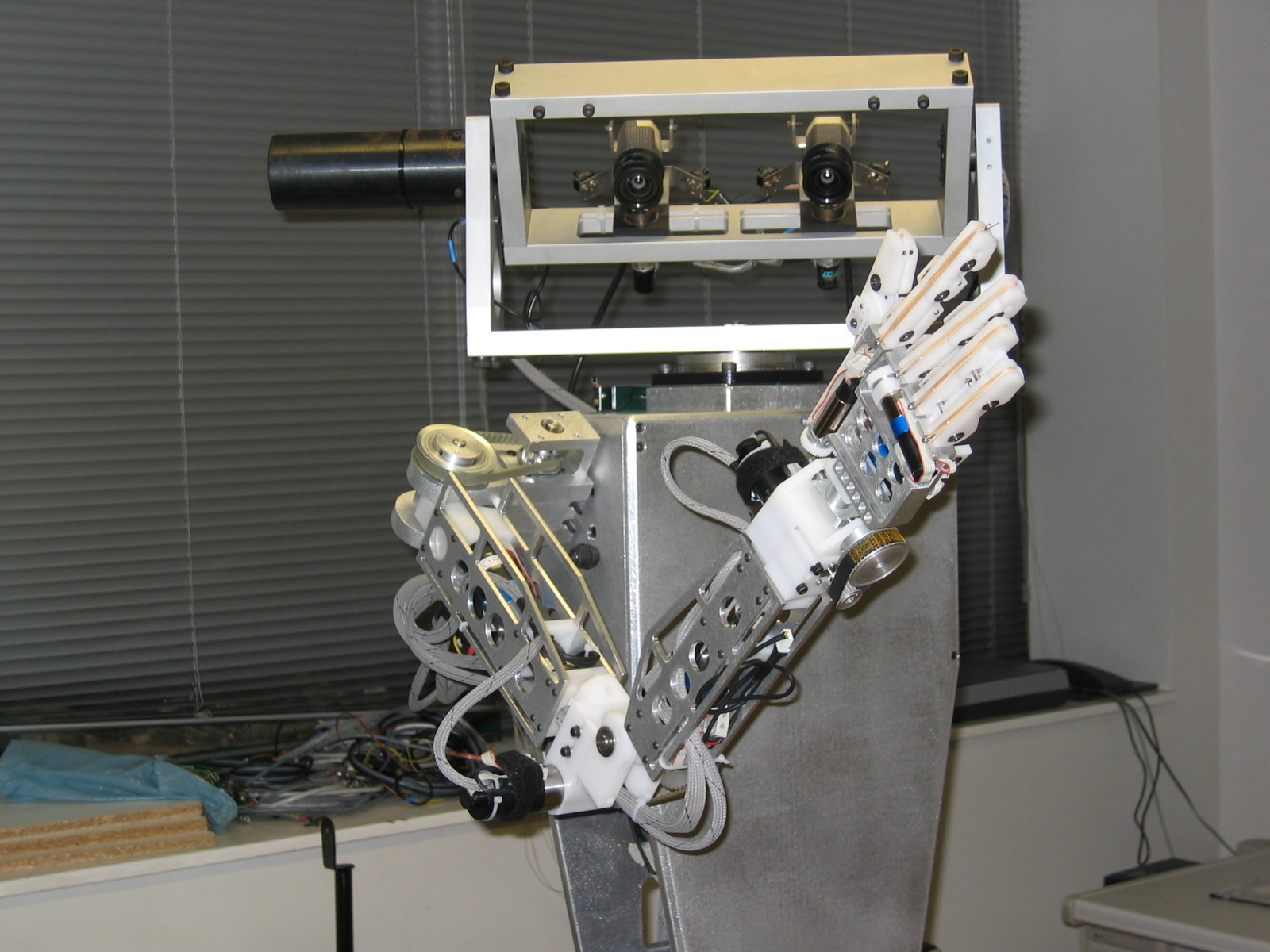
In this experiment (video) we show the coordination of the head and hand. This can be done by setting a positionning the hand and verge the eyes or by positionning the head and them move the hand to the front. Results using learning methods and algebric methods are available.
This is the development team:

Rodrigo, Ricardo, Manuel, Baltazar, José and Alex (italics for the non-DNA based creature)
An Anthropomorphic Robot Torso for Imitation: Design and Experiments, Manuel Lopes and Ricardo Beira and Miguel Praça and José Santos-Victor. International Conference on Intelligent Robots Systems (IROS), Sendai, Japan, 2004.
Vizzy
^ up